
Как работает робот? Устройство робота простыми словами
В 1920 году чешский писатель Карел Чапек придумал название для механизма, изобретенного для выполнения работы вместо человека - “робот”. Определение со временем прижилось и с конца XX столетия стало обозначать систему узлов, датчиков и механизмов, предназначенную для выполнения набора операций в соответствии с заложенной программой.
Прогресс науки и техники позволил инженерам-конструкторам создавать все более совершенные машины, способные заменить человека в экстремальных условиях: в космосе, под водой, на поле боя. Робот не знает усталости, способен выполнять без ошибок точнейшие движения - именно поэтому роботизированные механизмы постепенно вытесняют человеческий труд на производстве.
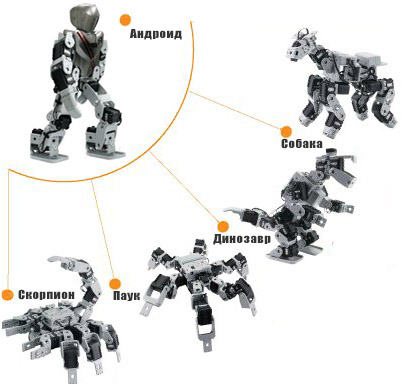
(Типы роботов)
Существуют десятки основных типов роботов, которые отличаются по нескольким параметрам - от назначения до внешнего вида. Для того, чтобы понять, как работает робот, рассмотрим его вид, наиболее приближенный к облику человека - робот-андроид.
Материалы для изготовления
Материалы, которые используют для получения узлов, механизмов и каркаса робота, зависят от нескольких факторов:
- Назначения машины;
- Условий ее работы;
- Заданных характеристик (веса, габаритов).
Наиболее часто используют полимеры всех типов, сталь с добавками, повышающими гибкость и прочность, алюминий, резину, карбоновые материалы, сплавы с содержанием титана.
Конструкция андроида
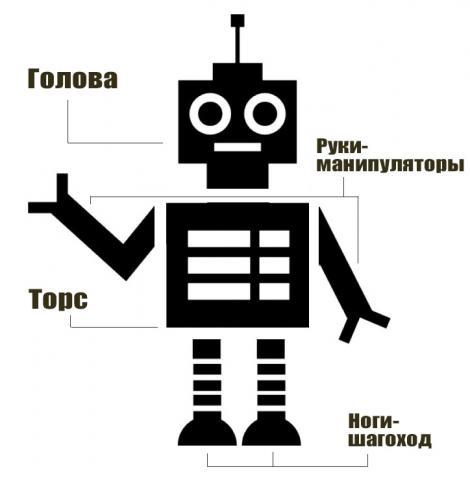
Человекоподобный робот состоит из нескольких основных частей:
- Голова - верхняя часть конструкции;
- Торс - основной каркас робота;
- Руки-манипуляторы с силовыми механизмами;
- Ноги-шагоход из двух нижних конечностей, если шасси, то гусеничного привода.
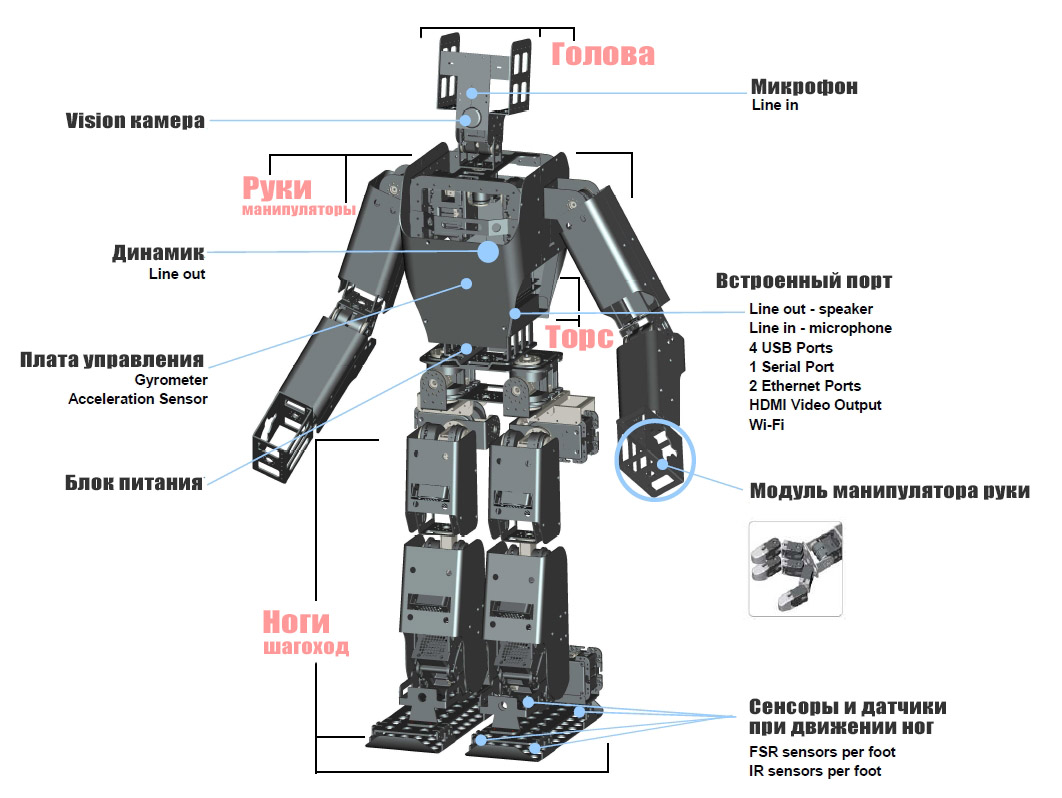
(Наглядная конструкция робота)
Вопреки распространенному мнению, что в голове андроида, как у живого человека, находится “мозг”, т.е. компьютер или центральный процессор, чаще всего в верхней части механизма располагаются другие элементы системы: видеокамеры, датчики, гироскоп. Это обусловлено сравнительно небольшими размерами “головы”, внутреннее пространство которой не способно вместить большой объем электроники.
Торс - наиболее защищенная часть робота. Во внутреннем пространстве каркаса размещают электронику, управляющую системой, автономный источник питания (аккумулятор).
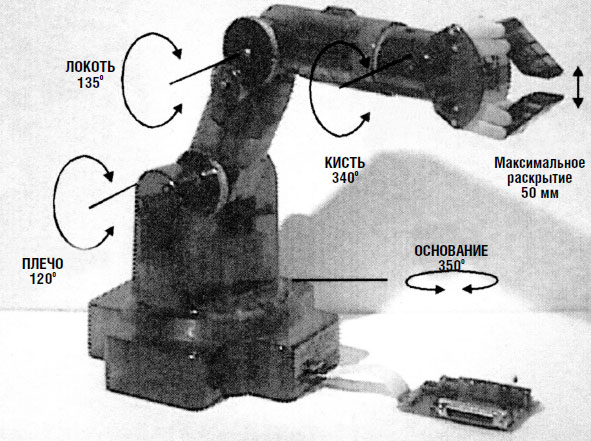
(Классическая рука-манипулятор)
Захват/перемещение груза, выполнение других операций, включая действия с инструментом - задачи для верхних конечностей - манипуляторов. Кистевые окончания могут иметь форму и функцию кистей человека.
Роботы-андроиды передвигаются шагами на двух “ногах”. Шасси копирует антропологические особенности строения человеческого тела: ноги состоят из нескольких составных частей, соединенных суставами-шарнирами. Отдельные модели роботов способны бегать, т.е. перемещаться таким образом, что обе ноги в момент движения не касаются поверхности.
Голова
Для распознавания окружающей обстановки - предметов, особенностей ландшафта - роботизированные комплексы оснащают видеокамерами (рисунок 1) с высоким разрешением. Их обычно размещают в голове андроида. Благодаря камере (или нескольким камерам) машина может идентифицировать (распознать) окружающие объекты, оценить их размер и расстояние до предметов.
В зависимости от ландшафта или особенностей архитектуры здания робот способен принять решение о способе передвижения и смещении центра тяжести, например, при подъеме/спуске по ступеням или наклонным поверхностям, преодолении рва или препятствия.

(Рисунок 1. Глаз-видеокамера слежения робота)
Видеокамеры оснащают несколькими модулями для получения дополнительной информации:
- В инфракрасном диапазоне;
- В режиме тепловизора.
Кроме камер, конструкция роботов предусматривает использование системы датчиков, которые определяют пространственное положение андроида на местности или в помещении, силу сжатия манипуляторов, скорость перемещения и т.п. Наиболее важный датчик для андроида - гироскоп, именно он сохраняет устойчивое вертикальное положение машины во время движения. Именно таким устройством оснащен робот-андроид Atlas, детище американской компании Boston Dynamics. От датчиков и камер информация поступает в “мозг” машины - компьютер или систему компьютеров.
Торс
В самой защищенной и просторной части робота устанавливают электронные платы системы управления и автономные источники питания.
Во время выполнения миссии роботом управляет компьютер - набор микросхем, предназначенный для получения, накопления информации, ее обработки и отправления сигналов к исполняющим механизмам, работающих при помощи двигателей (рисунок 2). Прогресс компьютерной техники позволяет устанавливать в андроиды все более совершенные системы анализа, способные использовать несколько наиболее продвинутых технологий:
- Распознавание объектов;
- Распознавание речи;
- Распознавание движений, жестов;
- Самообучение на основании получаемой информации;
- Запоминание внешнего вида объектов, лиц людей.
Поставить задачу перед андроидом можно программным способом, т.е. путем внесения перечня команд в ЦПУ, либо вербально, произнеся набор слов для начала выполнения задачи. Отдельные модели андроидов способны реагировать на жесты рук, изменение местоположения человека.
Система управления роботом очень напоминает построение нервной системы человека в зависимости от его развития:
- Прямое выполнение конкретных команд оператора;
- Необходимость постоянной корректировки действий андроида при выполнении общей задачи;
- Ввод конечной цели (указание направления действий).
В первом случае в памяти машины записаны команды, которые ЦПУ (центральный процессор) подает к исполнительным механизмам для выполнения определенных операций. Например, перемещение робота, изменение положения манипулятора и т.п. по команде оператора. Одна из самых дешевых и простых в изготовлении моделей.
При передвижении андроида из точки А к точке Б вмешательство оператора необходимо в случаях, когда набор алгоритмов (заранее записанных в память действий) не предусматривает преодоление сложных препятствий (к примеру).
Более продвинутый интеллект, получив информацию от системы датчиков, видеокамер, самостоятельно оценивает обстановку и выбирает наиболее оптимальное решение самостоятельно.

(Рисунок 2. Двигатель постоянного тока)
Основным источником энергии для современных роботов-андроидов является электричество. Источник питания может быть:
- Автономным - аккумуляторы, солнечные батареи;
- Внешним - электроэнергия подается по кабелю.
В первом случае машина не привязана к энергоресурсу, способна выполнять задачи на любом удалении от зарядной станции. Из недостатков - увеличенный вес робота, малое время работы. Кабельное снабжение электроэнергией имеет свои плюсы: меньший вес андроида, возможность использования большего числа узлов, датчиков, механизмов, неограниченное время работы.
Руки-манипуляторы
Манипуляторы копируют структуру рук человека (рисунок 3) и состоят из нескольких частей, соединенных шарнирами:
- Кистевого;
- Предплечья;
- Плечевого.
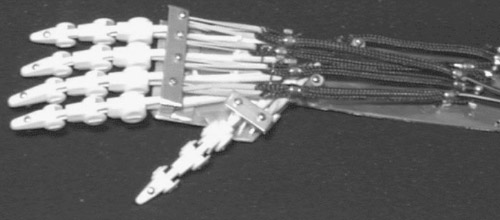
(Рисунок 3. Рука-манипулятор)
Манипуляторы имею несколько степеней свободы, т.е. робот может поднять руки, развести их в стороны, вращать кисти, производить захват предметов "пальцами". Манипуляторы приводятся в действие силовыми механизмами - сервоприводами. Часто для аккуратной и точной работы пальцы оснащают специальными датчиками, которые регулирую силу сжатия. Вместо грузозахватных приспособлений в кистевые отделы манипуляторов устанавливают другие приборы и механизмы: сварочные аппараты и т.д.
Ноги-шагоход
По аналогии со строением тела человека роботы-андроиды передвигаются шагами. Конструкция ног предусматривает возможность передвигаться бегом, преодолевать различные препятствия (лестницы, ямы, наклонные поверхности). Ноги, как и руки-манипуляторы, приводятся в действие двигателями (рисунок 4).

(Рисунок 4. Шаговой двигатель)
Для всех типов роботов используют несколько типов исполнительных механизмов:
- Механические;
- Электрические;
- Гидравлические;
- Пневматические;
- Гибриды (электромеханические, гидромеханические и т.д.).
Из-за особенностей конструкции роботов-андроидов (небольшие габариты, система шасси - шагоход) для механизации узлов наиболее часто используют сервоприводы или сервомоторы (рисунок 5), основу которых составляет электрический двигатель.

(Рисунок 5. Сервомотор)
В отличие от обычного электромотора, комплектный сервопривод способен:
- С высокой точностью определять и изменять угол положения вала;
- Потреблять ровно столько электроэнергии, сколько необходимо для выполнения определенного действия;
- Снижать нагрузку на детали робота, увеличивая их ресурс.
Работа-действие робота
Пример работы всех систем робота-андроида в связке
- Тип робота: андроид
- Способ управления: автономный
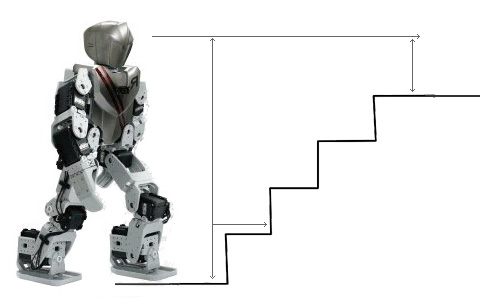
- Задача: преодолеть лестничный пролет
- После включения питания загружается ЦПУ, которая проводит проверку всех систем.
- После получения подтверждения об исправности машины компьютер стабилизирует вертикальное положение андроида при помощи гироскопа, оценивает препятствие камерами.
- Установив дальность до первой ступени и ее высоту, расстояние до других близко расположенных объектов, робот начинает движение.
- Сервоприводы приводят в действие нижние конечности, которые поднимают опорные площадки (стопы) на нужную высоту.
- Равновесие машины поддерживает гироскоп.
- После преодоления последней ступени робот останавливается либо продолжает движение вперед в зависимости от программы или полученной команды.
 12+
12+