
Квадрокоптер. История, принцип работы

Квадрокоптером называют летательное устройств, которое строят по схеме вертолета, но несущих винтов у этого аппарата четыре.
История
В целом вертолеты с несколькими винтами разрабатывали еще в начале вертолетостроения. Попыток создать многовинтовой вертолет было много, но первый квадрокоптер, который смог взлететь и держался в воздухе, был разработан Георгием Александровичем Ботезатом (русско-американский конструктор). Испытания конструкции проходили в 1922 году.
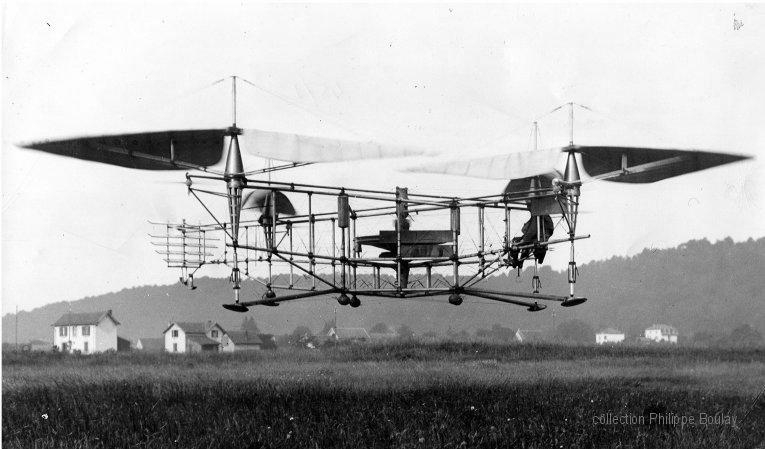
У первых аппаратов был один недостаток: вращение мотора передавалось сразу на 4 винта. После того как был создан автомат перекоса и хвостовой винт разработка и испытания квадрокоптеров завершились. В 1950-х годах начали проводиться новые разработки, но успехов достигнуть так и не удалось.
XXI век изменил все. Квадрокоптеры получили новую жизнь, но аппараты были созданы для беспилотного использования. Конструкция квадрокоптера отличается простотой, поэтому нередко этот аппарат используют любители для моделирования. На квадрокоптеры обычно устанавливают камеру, но она не мешает устройству работать и летать, так как располагается вдалеке от зоны работы винтов. Четырехвинтовой мультикоптер может использоваться для малозатратной киносъемки и фото с воздуха.
Принцип работы квадрокоптера
Четырехвинтовое устройство оборудовано 4 винтами постоянного шага. Такой мультикоптер отличается от одно- и двухвинтового тем, что автомата перекоса у него нет. У каждого пропеллера есть свой двигатель, приводящий устройство в движение.
Всего у четырехвинтового мультикоптера 4 двигателя, каждый из которых имеет собственное зарядное устройство (аккумулятор). 2 винта осуществляют вращение против часовой стрелки, 2 пропеллера – в обратном направлении. Благодаря такой работе основных винтов, мультикоптер не нуждается в хвостовом винте.
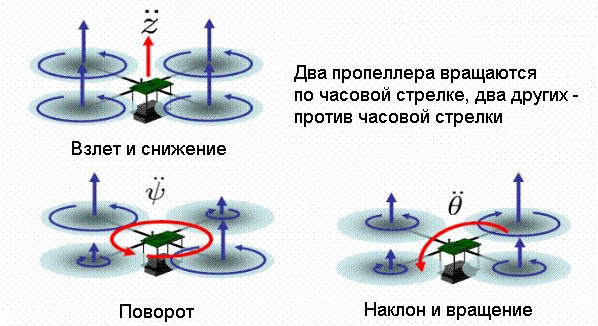
Маневрирование квадрокоптера осуществляется путем регулирования скорости пропеллеров и происходит таким образом:
- подъем устройства происходит путем ускорения всех четырех винтов;
- движение конструкции в сторону происходит, когда с одной стороны увеличивается скорость вращения пропеллеров, а с другой замедляется;
- поворот устройства — вращающиеся против часовой стрелки пропеллеры ускоряются, а те, что движутся по часовой стрелке, замедляются.
Устройство квадрокоптера
В квадрокоптере 4 винта, каждый из которых работает от собственного двигателя. Все винты работают целостно. Контролировать работу устройства получается благодаря микропроцессорной системе. Команды радиоуправления передаются на устройство и системой переводятся в команды каждому двигателю. Для стабильного зависания квадрокоптера в воздухе, на них обязательно устанавливают 3 гироскопа. Это позволяет зафиксировать крен мультикоптера.
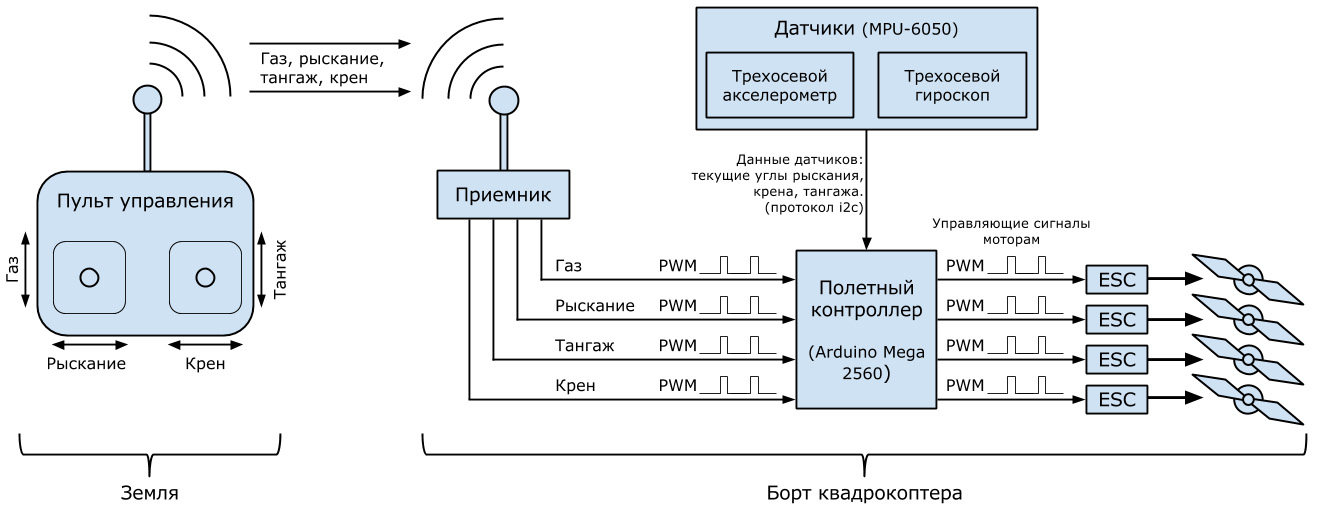
В некоторых случаях на аппарат могут быть установлены акселерометр (позволяет зафиксировать устройство в горизонтальном положении) и бародатчик (помогает установить аппарат на нужной высоте). Для удержания небольшой высоты и посадки в автоматическом режиме, может использоваться сонар. Он помогает облетать препятствия. На четырехвинтовой мультикоптер устанавливают приемник GPS. Он позволяет заранее записать с компьютера маршрут, по которому устройство будет лететь. Если связь с управляющим будет потеряна GPS-приемник помогает вернуть квадрокоптер к месту старта.
В зависимости от расположения двигателей, устройства делятся на 2 вида:
- Крестообразный. У мультикоптеров этого вида двигатели размещены так: по одному двигателю спереди, сзади и по бокам.
- В виде буквы «Х». В таких устройствах 2 пропеллера находится спереди, 2 сзади. Вместе они напоминают букву «Х».
Виды квадрокоптеров
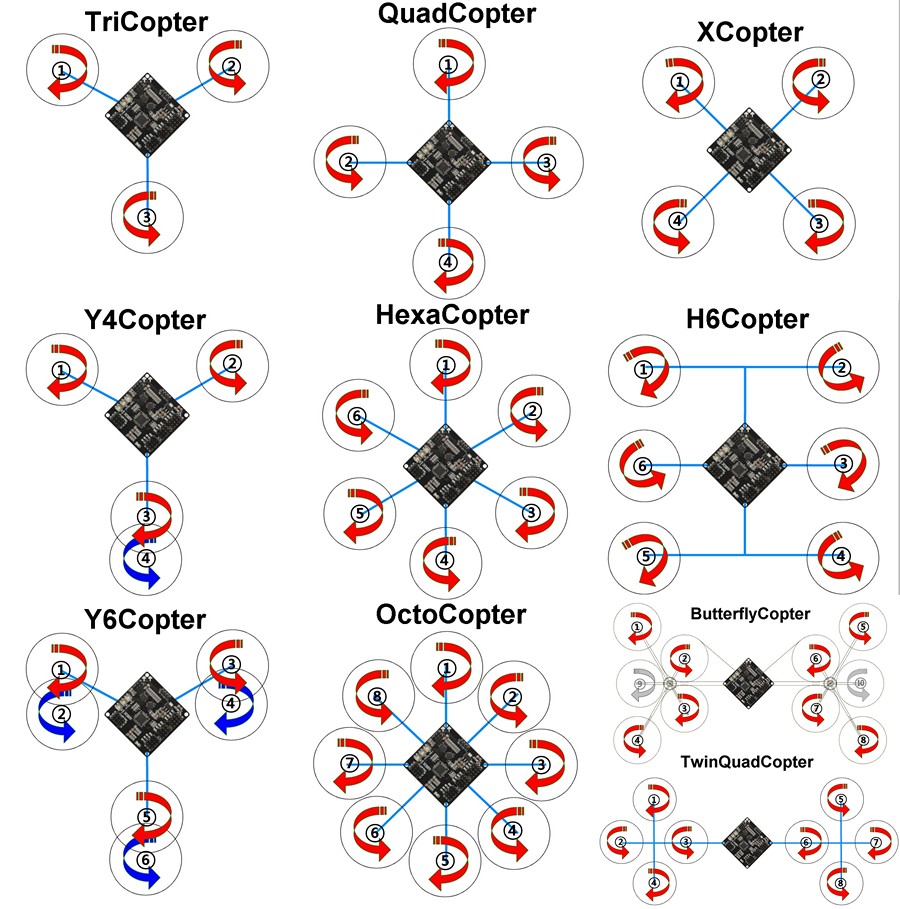
- TriCopter - 3 винта
- QuadCopter - 4 винта
- XCopter - 4 винта в X-образном положении направления полета
- Y4Copter и Y6Copter - 3-х позиционный коптер с допорлнительными винтами, вращающимися в противоположную сторону для большей устойчивости и маневренности
- HexaCopter и OctoCopter - 6-ти и 8-ми винтовые коптеры
- H6Copter - 6 винтов по 3 параллельных пары
- ButterflyCopter и TwinQuadCopter - усложненные конструкции, состоящие из двух независымых винтовых комплексов.
Также квадрокоптеры можно поделить на 3 вида по сборке:
- Полностью готовы к запуску. Покупные устройства уже собраны и готовы к полету. Они удобны тем, что достав мультикоптер из коробки, его можно сразу использовать: он настроен, откалиброван, не смещен центр тяжести.
Устройства бывают разных ценовых категорий. Брендовые аппараты имеют высокую цену. Такие конструкции можно смело назвать «полноценными». Использовать такие устройства уместно для видеосъемки, фото с воздуха. Дорогие брендовые модели оснащены хорошей камерой, GPS-приемником и многим другим. Бюджетные модели создаются из материала невысокого качества, детские квадрокоптеры делают из пластика. Такие модели подходят новичкам, детям.
- Нуждаются в частичной сборке. Такая конструкция практически готова к полету. Обычно это частично собранный аппарат. Иногда некоторые части нужно докупить, укомплектовать и смело пользоваться. Такой комплект обычно стоит дешевле брендового готового устройства.
- Комплект для сборки с нуля. Такая конструкция содержит в себе лишь самые необходимые комплектующие. В комплект не входит камера, передатчик. Управление таким устройством осуществляется с земли.
За и Против
Плюсы четырехвинтового мультикоптера:
- Эксплуатация недорогая. Даже при поломке запчасти легко подобрать в магазине и заменить.
- Полет очень стабильный.
- Емкий аккумулятор. Хорошая батарея обеспечивает длительную работу устройства, возможность перемещать небольшие грузы и производить длительную видеосъемку.
Единственный недостаток – цена. Существуют и бюджетные модели, но качество материалов не всегда самое хорошее. К тому же на нем установлено лишь самое необходимое. Если вам нужен квадрокоптер для профессионального использования, придется выложить немалую сумму.
 12+
12+