
Что такое робот? Основные понятия

Слово «робот» произошло от чешского robot от «robota» — "барщина, подневольный труд". От этого же слова берёт этимологическое начало древнерусское слово «рабство» и старославянское «работа». Впервые слово robot было напечатано в 1920 году в пьесе Карела Чапека «R.U.R», а придумал его брат писателя – Йозеф.
Первое появление слова робот
R.U.R. (с чеш.яз. Rossumovi univerzalna roboti, «Россумские универсальные роботы») научно-фантастическая пьеса Карела Чапека, написана в 1920 году. В Праге 25 января 1921 года состоялся премьерный показ пьесы.
Главная задача робота, помощь и облегчение труда человека, беря некоторые физические, в некоторых случаях и умственные, задачи на себя, тем самым дополняя и даже заменяя деятельность человека.
Робот, это:
В современном понимании, робот – это устройство с антропоморфным поведением (подобно человеку), созданное с целью выполнения заданных операций. Деятельность роботов направлена на облегчение труда человека на производстве посредствам исполнения опасных, рутинных, тяжёлых работ.
Изначально, понятие робот предполагало человекоподобное устройство, внешне схожее с человеком:
Составные части робота:
- Голова - CPU - процессор, главный интеллект робота; датчики зрения, слуха и динамики для возможности речи робота;
- Руки-манипуляторы - с захватывающими кистями манипуляторами;
- Торс - туловище, эндоскелет робота с часто расположенным в нём блоком питания;
- Ноги-шагоход - обеспечивают шаговое движение, а также другие модели: шасси и гусеничный ход.
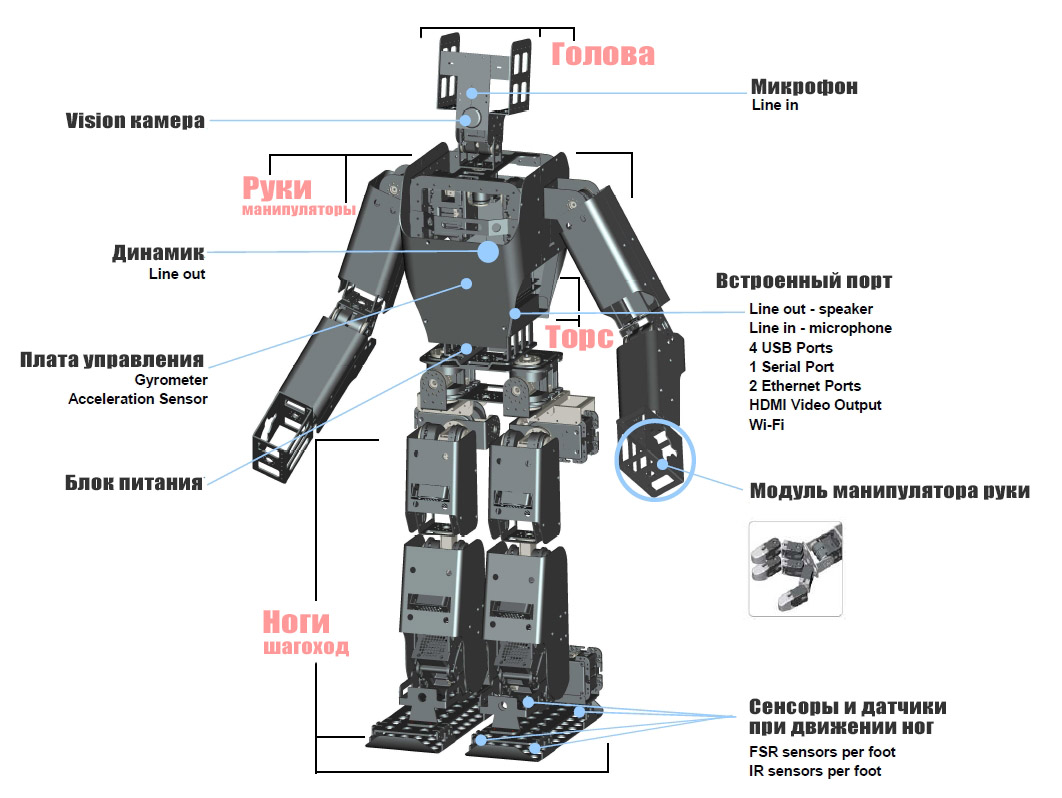
(Наглядное устройство робота)
Управление устройством, в зависимости от заложенной программы, осуществляется с пульта управления или в автономном режиме.
Ключевые даты в развитии роботов:
1500 год. Франция поражена механизированным львом Леонардо да Винчи, который двигался и представлял герб государства.
1617 год. Джон Непер разрабатывает элементарное вычислительное устройство.
1878 год. На Всемирной выставке в Париже Пафнутий Чебышев презентует стопоходную машину
1891 год. Никола Тесла изобретает катушку, производящую напряжение высокой частоты.
1893 год. Тесла создаёт асинхронный двигатель, питающийся от сети переменного тока.
1898 год. Изобретение Теслы первого в мире пульта дистанционного управления.
1921 год. Первое упоминание слова «робот» в пьесе «R.U.R.» Карела Чапека.
1950-е годы. Активная разработка механических манипуляторов, которые копировали движение человеческих рук.
1971 год. Изобретение первого в мире микропроцессора.
1980 годы. Сильнейший скачок роста рынка робототехники, произошедший благодаря коммерческой реализации японских роботов.
2000 год. Компания Electrolux в эфире телеканала BBC представила робот-пылесос Trilobite.
2004 год. Марк Тилден создает первую коммерчески успешную игрушку робота Robosapien.
2010 год. Корейская фирма Ilshim Global презентует первого в мире робота для мойки окон Windoro.
С 2017 года. Основное направление робототехники – это прогресс искусственного интеллекта.
Несколько позже с развитием технологий такое понятие получило более широкое значение. В информационном пространстве, в основном сетевом, понятием робот также называют программу, действующую автономно, т.е. сама по себе, выполняющую определенную функцию. Например, поисковый робот-паук, сканирующий сеть, собирающий информацию; биржевой робот, самостоятельно участвующий в торгах по заданным параметрам; различные боты и другие программы.
Используемые технологии
Искусственный интеллект
Свойство механизмов самостоятельно выбирать путь решения для каждой поставленной перед ним задачи, опираясь на информацию базы данных. Важнейший аспект при этом – самообучение, в ходе которого робот разрабатывает программы действий.
ИИ использовались при создании: Deep Blue – анализатора-шахматиста, который сумел обыграть чемпиона мира Каспарова; MYCIN, способного ставить точный диагноз пациенту после оценки состояния его здоровья, а также ViaVoice служащие в качестве консультантов, умеющие поддерживать конструктивный диалог с потребителями.
Навигация
Навигационная бортовая система выполняет несколько функций одновременно:
- Выбор маршрута;
- Управление характеристиками движения (в том числе скорость вращения колёс, их направление);
- Получение и интерпретация данных от датчиков об окружающей среде и собственного положения в ней.
Наибольший вклад в совершенствование систем навигации внесли компании, разрабатывающие видеоигры. Они инвестировали огромные средства в исследования и разработку соответствующих проектов.
Система передвижения
В зависимости от области применения, перемещение роботов происходит различными способами:
- В производственных помещениях, цехах, складах – по направляющим балками или монорельсам;
- Для передвижения по открытой или пересечённой местности наиболее популярными считаются гусеничные или колёсные движители;
- Бионические механизмы основываются на способах передвижения животных и насекомых (инсектоморфные, ползающие, плавающие и др.);
- Если движение происходит в вертикальной плоскости, устанавливаются шагающие вакуумные присоски;
- В осложнённых условиях эксплуатации, где поверхность передвижения не однородна, применяют комплексные конструкции, совмещающие в себе сразу несколько элементов для передвижения (яркий пример – луноход).
Компьютерное зрение
Технология, наделяющая робота способностью определять, классифицировать объёмные предметы и изображения, распознавать образы. Благодаря этому были созданы устройства, собирающие пазлы и конструкторы Lego, системы видеонаблюдения, 3D-моделирования, виртуальной реальности, индексированные базы изображений.
Виды роботов
Общепринятой классификации роботов не существует. Основные характеристики, по которым можно условно поделить все модели – назначение и внешний интерфейс.

По внешнему интерфейсу роботы делятся на:
- Андроиды. Человекоподобные, шагающие;
- Роботы подобные животным. Непохожие на человека или подобные роботизированным животным (роботы-собаки, робоживотные);
- Гуманоидные роботы. Внешне напоминающие человека ( человек-машина, персональный робот).
Андроиды
Андроиды внешне абсолютно идентичны человеку, поэтому имеют второе название «синтетический человек». Они способны поддерживать разговор, используя большой словарный запас, а их поведение зависит от факторов внешней среды и логично изменяется. Сфера обслуживания теоретически может перейти на использование андроидов вместо многих сотрудников.

(Робот андроид)
Роботы, подобные животным
Применяются в качестве игрушек или в целях слежки за дикими животными в их естественных условиях обитания. Уже изобретены электронные зооморфы внешне идентичные гикконам, белкам, собакам, медузам, червям, гепардам и т.д.

(Робот собака)
Гуманоидные роботы
Внешне они отдалённо напоминают человека. В основном их корпус состоит из подобия головы, рук, ног и туловища. Но эти элементы более схожи с частями машины, нежели человека. Гуманоиды обычно имеют узкую направленность действий, например раздача рекламных листовок, определённая игра с детьми.

(Робот компаньон)
- По выполняемым функциям выделяют:
- Бытовые;
- Промышленные;
- Боевые;
- Микророботы;
- Персональные;
- Специализированные: транспортные, исследовательские, сельскохозяйственные и другие.
Бытовые роботы
Ежедневное применение в быту отличает эту группу роботов от других. Помимо всеобще известных роботов-пылесосов и мойщиков окон, к этому классу относятся робоигрушки для детей и средства-коммуникаторы, создающие эффект присутствия человека, находящегося на большом расстоянии (передающие его сердцебиение или частоту дыхания).

(Робот-пылесос)
Промышленные роботы
Замена человеческого труда на производстве роботизированным механизмом широко распространена по ряду причин. Качество выпускаемой продукции возрастает за счёт исключения ошибок, связанных с «человеческим фактором». Работоспособность 24 часа в сутки, 7 дней в неделю повышает производительность предприятия минимум дважды. Никакие вредные испарения или излучения не становятся помехой в работе.
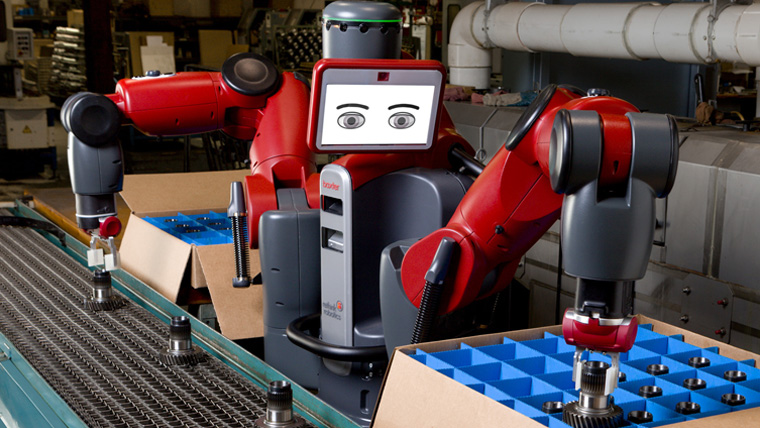
(Робот для захвата предметов)
Операции, выполняемые промышленными роботами: штамповка, сварка, фрезеровка, транспортировка грузов, сборка, обработка, окрашивание и т.д.
Боевые роботы
Минимизация человеческих потерь в военных действиях достигается посредствам введения в вооруженные силы роботов. Для каждого рода войск разработаны определённые модели: роботы-сапёры, беспилотники, подводные и надводные корабли с дистанционным управлением, вертолёты-разведчики, роботы-минёры и т.п.

(Военный робот)
Из-за неоднозначности мнений по поводу ответственности за действия роботов их применение в реальных условиях ограничено.
Микророботы
Отличительной особенностью этого вида является сверхмалый размер – до 1мм. Чаще всего работа таких устройств связана с групповым взаимодействием (например, для быстрого построения сверхпрочной и лёгкой материи) или с объектами, площадь которых исчисляется микрометрами.
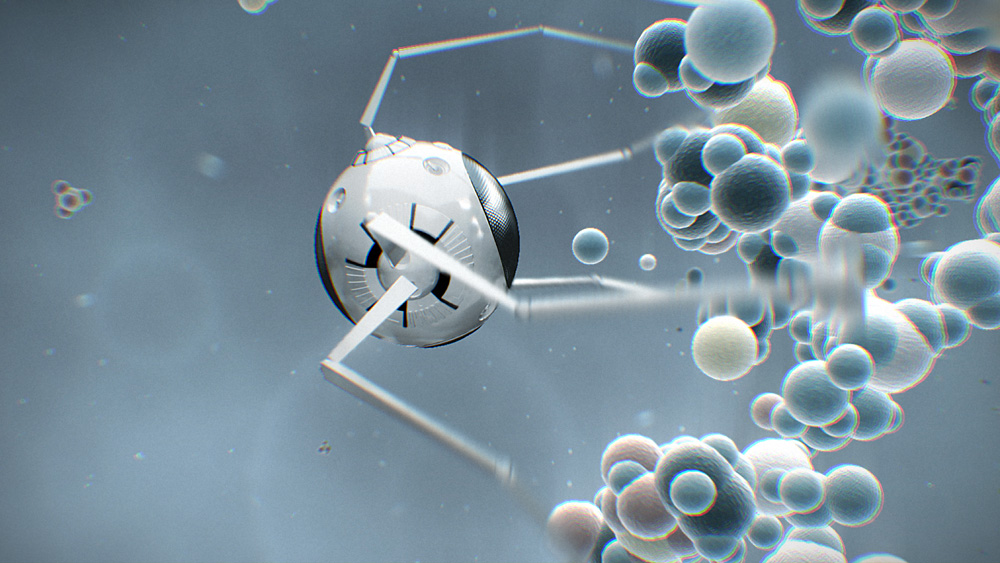
(Микроустройство размером с частицу - Наноробот)
Рассматриваются перспективы применения микроустройств - нанороботов в медицинских целях (для проникновения в организм с последующей диагностикой).
Персональные роботы
Персональные роботы предназначены для сопровождения определённого человека, выполнения его просьб, общения с ним. Из-за недостаточной совершенности ПО идеальный компаньон для человека ещё не создан. Разработчики предполагают, что он будет иметь чувствительные датчики для распознавания не только звуковых сигналов, но и мимики, жестов, манеры поведения объекта. Запоминание характерных черт поведения и самосовершенствование позволят добиться взаимопонимания между роботом и пользователем.

(Персональный робот будущего)
Специализированные роботы
Технические роботы определенных специальностей с узкой спецификой и олее широким применением определенных отраслей:
- Транспортные - основные направления деятельности транспортных роботов – это автономное управление средствами передвижения (автопилотирование, самоходные автомобили) и перемещение грузов.
- Исследовательские - используются для сбора данных из труднодоступных для человека областей, для направления их на изучение специалистам. При этом объекты исследования могут быть самыми разнообразными: от подземного пространства до поверхности планет.
- Сельскохозяйственные - применяются в основном для выполнения монотонных и трудных операций, таких как вспахивание земли, высадка, прополка, обработка удобрениями больших площадей и т.д.
- ...и других специализированных областей.
Три закона робототехники Айзека Азимова
Классик мировой фантастики сформулировал три основных правила поведения роботов, которые в теории должны быть заложены в роботах на уровне инстинктов. Они приписывали роботам некоторые ограничения действий, которые наделяли механизмы эмоциональной составляющей.
Появление законов
До формулирования трёх законов робототехники вся научная фантастика преподносила роботов как нечто угрожающее существованию человека. В произведениях часто встречался сюжет истребления роботами человечества. Азимов же, в своих рассказах пописывал устройства наделённые качествами, напоминающими совесть, честность, преданность.
В 1940 году беседа Азимова с его другом Джоном Кэмпбеллом по поводу последних новостей научной фантастики закончилась описанием трёх постулатов. По словам Кэмпбелла, он извлёк их из уже существующих произведений Айзека.
Три закона робототехники:
- Робот не может причинить вред человеку или своим бездействием допустить, чтобы человеку был причинён вред.
- Робот должен повиноваться всем приказам, которые даёт человек, кроме тех случаев, когда эти приказы противоречат Первому Закону.
- Робот должен заботиться о своей безопасности в той мере, в которой это не противоречит Первому или Второму Законам.
Значение законов
Обязательные правила поведения для всех роботов подчёркивают главенство человека над созданными им механизмами. Основной посыл заключен в приоритетной безопасности любого действия или бездействия устройства.

Однажды, в 1986 году в романе "Роботы и Империя" Айзек Азимов добавил нулевой закон. Добавление дополнительно закона обосновано его приоритетностью относительно остальных.
Нулевой закон
Робот не может нанести вред человечеству или своим бездействием допустить, чтобы человечеству был нанесён вред.
Нулевой закон утверждает, что действия робота должны быть направлены на интересы человечества, а не только отдельно взятого человека.
Таким образом, первоначальное и неотъемлемое значение робота — быть безоговорочным помощником человека, служить в интересах науки и всего человечества!
 12+
12+